
Маятник Фуко
Воспользуемся упрощенными уравнениями, полученными при определенных допущениях, и рассмотрим движение маятника в Париже. Кроме того, интересно добавить решение полных уравнений, чтобы показать, что эти приближения обоснованы, и чтобы получить уравнения, которые действительны и для более высоких скоростей вращения.
Широта в Париже соответствует sin( ) = 0.75.
) = 0.75.
- restart;
- sf:=3/4;

- DE1:=diff(x(t),t$2)+g/L*x(t)=2*w*sf*diff(y(t),t);

- DE2:=diff(y(t),t$2)+g/L*y(t)=-2*w*sf*diff(x(t),t);

Здесь w – скорость вращения Земли; L – длина плеча маятника; g – ускорение свободного падения:
- w:=evalf(2*Pi/(24*60*60)); # in inverse seconds

- L:=69; #69 meters

- g:=9.8;

Начальные условия: задается начальное смещение по x, мы находимся на оси y, и маятник начинает движение с нулевой скоростью:
- IC:=x(0)=L/10,D(x)(0)=0,y(0)=0,D(y)(0)=0;

- sol:=dsolve({DE1,DE2,IC},{x(t),y(t)});
Громоздкая выдача не показана – увидите сами.
- assign(sol);
Есть простое аналитическое решение для двух связанных уравнений:
- evalf([x(t),y(t)]);
Выдача не показана.
Нарисуем расположение двух компонент друг за другом в течение примерно трехминутного интервала по прошествии получаса (рис. 4.12.1):
- plot([x(t),y(t)],t=1800..2000,color=[red,blue],
thickness=3);
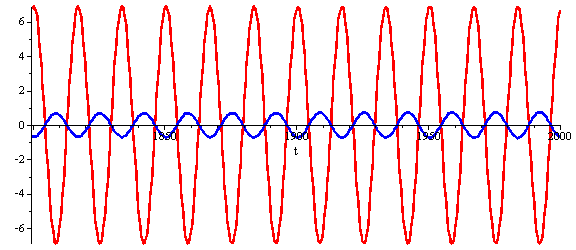
Рис. 4.12.1
Не существовавшая в начале движения y-компонента набрала более 10 % от x-амплитуды. Нарисуем фактическую траекторию в самом начале, подчеркивая начало вращения (прецессия). Результат – на рис. 4.12.2:
- plot([x(t),y(t),t=0..25],thickness=3);
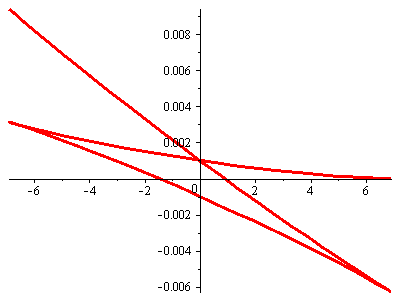
Рис. 4.12.2